GPS 坐标计算方向角 & 夹角 & 距离
这是 使用GPS坐标来计算距离和方位角 的全文转载,附加了 夹角计算,及一些 py 代码实现.
资料来源:
https://johnnyqian.net/blog/gps-locator.html
https://www.igismap.com/formula-to-find-bearing-or-heading-angle-between-two-points-latitude-longitude/
https://blog.csdn.net/weixin_30293135/article/details/96275339更新
1
22022.05.01 初始
2022.05.07 添加夹角计算
导语
最近遇到个需求
- 计算大量两点之间方向角与距离
- 精度没有太大要求,但是要求稳定,即在一个坐标系下.
- 速度,速度,速度…
so 最后是 WGS84 参考系下,计算距离与方向角.
下文基本是转载 使用GPS坐标来计算距离和方位角
- 作者将计算距离和方向角推导非常完整了,再追加就多余.
- 仅补充两个 python 的实现.
- (22.5.7) 补充夹角计算
GPS 坐标计算方向角 & 夹角 & 距离
根据地球上任意两地的经纬度,可以计算它们在球面上的最短距离(Great-circle Distance / Orthodromic Distance)及相对始末位置的方位角(Bearing)。
基本概念
行星的自转使得其呈现“椭球型”:在赤道上凸起,在极点平坦。所以赤道半径比极半径大。
地球的赤道半径a,或长半轴,是从地球中心至赤道的距离,大约为6378.1370km。
地球的极半径b, 或短半轴,是从地球中心至南极或北极的距离,大约为6356.7523km。
在地理学上,椭球体的平均半径计算公式为:

对于地球而言,平均半径为6371.0088km。

经纬线
经纬线是人类为度量方便而假设出来的辅助线。纬线定义为地球表面某点随地球自转所形成的轨迹。任何一根纬线都是圆形而且两两平行。纬线的长度是赤道的周长乘以纬线的纬度的余弦,所以赤道最长,离赤道越远的纬线,周长越短,到了两极就缩为0。
经线也称子午线,和纬线一样是人类为度量而假设出来的辅助线,定义为地球表面连接南北两极的大圆线上的半圆弧。任两根经线的长度相等,相交于南北两极点。每一根经线都有其相对应的数值,称为经度。经线的长度大约为20003.93km。
有如下的表格:
| 纬度度量 | 相差距离 |
|---|---|
| 1度 | 111.13km |
| 1分 | 1.85km |
| 1秒 | 30.87m |
| 0.1度(6分) | 11.11km |
| 0.01度(36秒) | 1111.33m |
因此,单从纬度这个角度来看,如果要达到10m左右的误差,纬度坐标需要达到0.0001度这个精度。
计算任意两点间的距离
地理空间距离计算方法较多,目前可以分为两类:
- 椭球模型,该模型最贴近真实地球,精度也最高,但计算较为复杂
- 球面模型,这种模型将地球看成一个标准球体,球面上两点之间的距离即为弧长,这种方法使用较广
- 简化模型,这种模型适用于两点距离较近的情形,可以认为两点在一个二维平面上,并且经纬线相互垂直
下面我们只探讨球面模型和简化模型。
球面模型
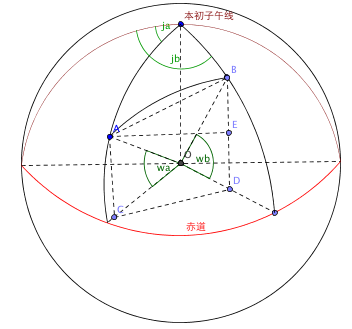
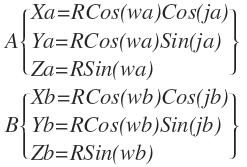
假设地球上有A(ja,wa),B(jb,wb)两点(ja和jb分别是A和B的经度,wa和wb分别是A和B的纬度),A和B两点的球面距离就是AB的弧长,也叫做大圆距离,AB弧长=R*角AOB(角AOB是A跟B的弧度,O是地球的球心,R是地球半径)。如何求出角AOB呢?可以先求三角形AOB的最大边AB的长度,再根据余弦定律可以求夹角。
1)根据经纬度,以及地球半径R,将A、B两点的经纬度坐标转换成球面坐标
2)根据A、B两点的三维坐标求AB长度

3)根据余弦定理求出角AOB

4)于是得到AB弧长=R*角AOB

此公式也可以直接使用
三面角的余弦定理(Spherical law of cosines)得到,在下文求解两点间的方位角时,我们也会用到这个余弦定理。
这个公式被称为大圆距离公式,但是这个计算公式有有个比较大的问题 ── 当两点相距较近时,cos(jb-ja)的误差会比较大。那么如何解决这个问题?
Haversine 公式
首先,我们先介绍一个三角函数 versine.

Sine, cosine, and versine of angle θ in terms of a unit circle with radius 1, centered at O.
Versine,中文称之为正矢,在三角函数之中被定义为  ,值域在0~2之间。
,值域在0~2之间。
根据正弦的半角公式:

正矢可以变换为:

由此,我们可以定义正矢的一半,即半正矢(half versine,记为hav)为:

在上述的大圆距离公式的基础上,我们记:
1 | δ=角AOB,即球心角 |
有如下的推导过程:
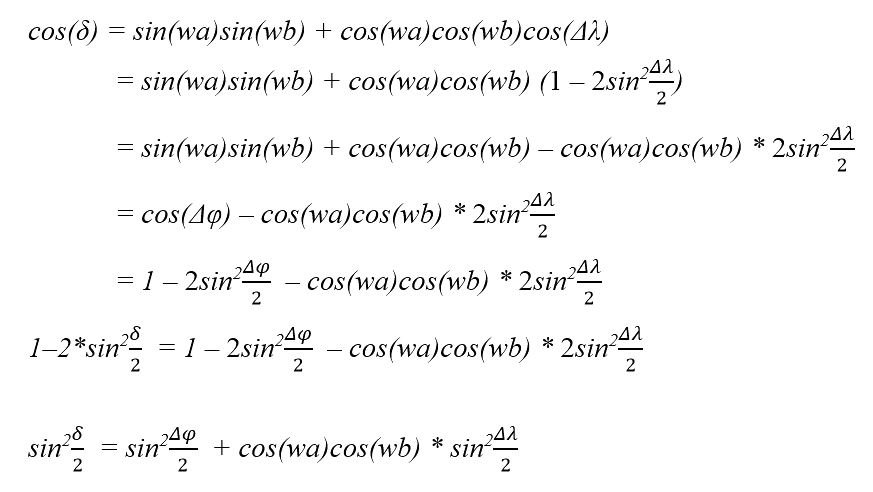
结合上述对半正矢的定义,我们就可以得出如下的Haversine 公式:

Haversine 公式描述了球面三角形的特性,我们这里不展开叙述。
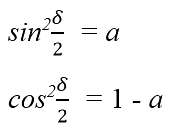
我们记a为:

由此,我们可以得到:
进而得到球心角δ为:

这里
atan2是反正切函数arctan的一个变种。
基于值域为
的反正切函数,该函数定义如下:
 的反正切函数,该函数定义如下:
的反正切函数,该函数定义如下:
工程上经常使用
atan2,目的是确保得到的角度在正确的象限中。
简化模型
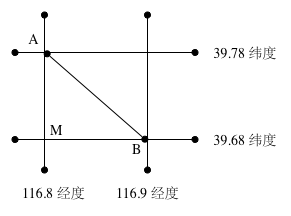
简化模型适用于两点距离较近的情形,可以认为两点在一个二维平面上,并且经纬线相互垂直。如图所示,要求A(116.8, 39,78)和B(116.9, 39.68)两点的距离,我们可以先求出南北方向距离AM,然后求出东西方向距离BM,最后求矩形对角线距离。
工程实现
下面是计算地球上任意两点间的距离的工程实现,使用C#语言,包括球面模型和简化模型:
公式中所用到的角度都是弧度单位(rad),因此常规的经纬度需要先转换。
1 | public class Distance |
球面距离计算 python
- 输入是通常经纬度
1 | import numpy as np |
计算任意两点间的方位角
方位角是从某点的指北经线起,依顺时针方向到目标方向线之间的水平夹角(如图所示θ,可以将其看成是指南针所指示的角度),也即是OPN平面与OPQ平面的所构成的二面角大小。
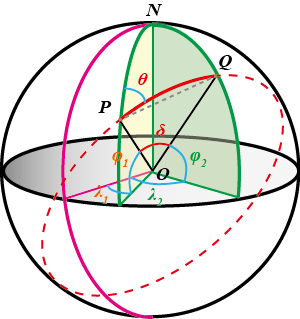
以北极点N为顶点,N-PQO构成了一个三面角。
二面角N-PQ-O的大小为θ,其平面角为π/2 - φ2;
二面角p-ON-Q的大小为λ2−λ1,其平面角为δ;
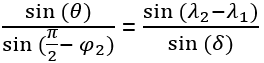
由三面角正弦定理可得:
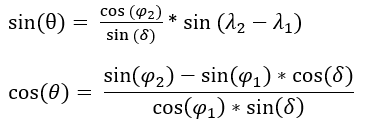
由三面角余弦定理可得:

由此可得:
结合上述在求解两点间的距离时得到的结果:

可得到:
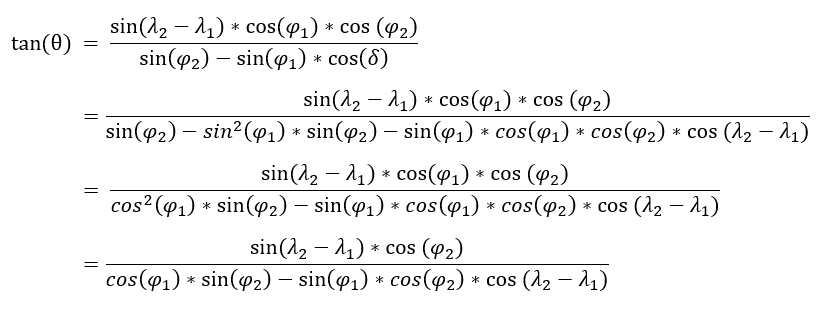
进而得到方位角:

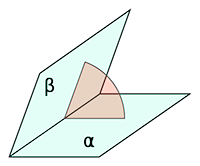
二面角
从一条直线出发的两个半平面所组成的图形,叫做二面角。 这条直线叫做二面角的棱,每个半平面叫做二面角的面。以二面角的公共直线上任意一点为端点,在两个面内分别作垂直于公共直线的两条射线,这两条射线所成的角叫做二面角的平面角。二面角的大小, 可以用它的平面角来度量。
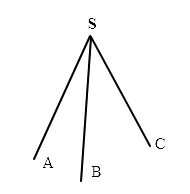
三面角
从一点出发并且不在同一平面内的三条射线,其中每相邻两射线可以决定一个平面,这样的三个平面所围成的立体图形叫做三面角。其中,这三条射线叫做三面角的棱,这些射线的公共端点叫做三面角的顶点,相邻两棱所夹的平面部分叫做三面角的面,在每个面内两条棱所形成的角叫做三面角的面角,过每一条棱的两个面所形成的二面角叫做三面角的二面角。一个三面角可以用它的顶点的字母来表示,例如“三面角S”;或在顶点的字母之后加一短划,并顺次写上每一条棱上的一个字母,例如“三面角S-ABC”。
工程实现
下面是计算地球上任意两点间的方位角的工程实现,使用C#语言:
- 计算公式适用于地球上任意两点,请注意经纬度分正负值。对于经度来说,东经为正,西经为负;对于纬度来说,北纬为为正,南纬为负。
1 | public class Bearing |
二面角的 python 实现,输入通常经纬度.
1 | def get_heading(lat1, lon1, lat2, lon2): |
Reference
- Earth radius
- Meridian
- Great-circle distance
- what-is-the-difference-between-atan-and-atan2
- Dihedral angle
- 三角恒等式
- 根据两点的经纬度求方位角和距离
- 万能公式求二面角——三面角第一余弦定理
- 震中距、方位角和反方位角的计算
夹角计算
内容来自 计算3个地理坐标点之间的夹角,将代码转换成了 numpy 实现,方便 pandas 调用.
原理不加赘述,3 点坐标转换为两个向量,计算向量夹角.
- 注意: 这里是把地理位置当成平面正交坐标系,地球是椭球体,这里的夹角会存在误差,仅在距离较近 3 点使用.
1 | def geo2xyz(lat, lng, r=6400): |